Highlights
- Students in an engineering capstone course are developing robotic control systems fit for space exploration
- The team on the College Station campus is collaborating with Texas A&M students in Qatar via video conference on the robot’s mechanical aspects
Monitoring and controlling technical systems through the internet could be the next phase of space exploration and the Department of Engineering Technology and Industrial Distribution at Texas A&M University is a leader in developing a system to suit NASA’s needs.
The Electronic Systems Engineering Technology (ESET) senior capstone team, Enclave Electronics, is tackling this project. Members include Matthew Greco, project manager, Erin Pruca and Ryan Sharp, hardware engineers, Jonathan Presley and Shen Gao, software engineers, and Matthew Johnson, system integration engineer.
Organizations such as NASA have realized the potential of a system like the team is working on and are very interested in the success of its efforts.
“The Internet of Things (IOT) is a developing area of technical interest,” said Greco. “This is also one of the technologies that NASA is interested in pursuing for space exploration in the future. NASA requires an IOT capability of sending and receiving data via the internet integrated into a robot vehicle.
“We are partnering with another capstone design team of mechanical engineering students in Qatar to modify the robot’s mechanical aspects and make it moon ready, giving NASA even more of an incentive to pick our project.”
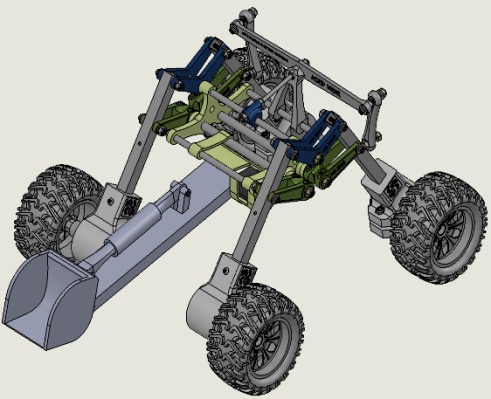
The Digital Systems Teaching and Research (DSTR) robot (disaster), will be demonstrated to NASA as a prototype for what it could use for a proposed future lunar exploration.
“A user of this internet of things (IOT) system will be able to collect sensor data remotely via the internet and send movement command to the DSTR robot from the user interface,” Sharp said. “Our system, the Wireless IOT for SensorTag (W.I.T.S.) Platform will demonstrate the cloud control movements, send terrains similar to lunar landscapes for testing, function as a prototype for future IOT projects and utilize mechanical expansions for the DSTR.”
A Texas Instruments SensorTag, that includes a total of 10 sensors, will control the W.I.T.S. Platform. Enclave will add additional sensors and communications to track and communicate with satellites.
“This tracking module is capable of having 52 channels which means it can track up to 52 satellites,” Johnson said. “The more satellites you have, the better it can do its mathematical calculations to determine its physical location.”
Sensor and control commands will be held in a repository on a ThingWorx cloud that can subscribe to sensor control commands for the W.I.T.S. Platform.
“The sensor data will be collected from the W.I.T.S. Platform, aggregated together, and be sent out as a single packet to the ThingWorx Cloud,” Presley said. “The ThingWorx Cloud will be able to store at least a day’s worth of real-time sensor data and transmit real-time control commands.”
The development of a prototype began at the end of the fall 2016 semester when the Texas A&M team joined forces with the capstone team from Qatar.
“We sent the entire set of DSTR design files to the team of engineers in Qatar so they could 3-D print the parts and assemble the same model we are looking at here,” Greco said. “One of their team members will also be trying to help us understand the mechanical aspects of what they are doing and how it may affect us or if we need to make changes.”
In addition to the collaboration with the Qatar students, Greco’s team has enlisted the help of faculty members from the department at the College Station, Texas, campus.
“Dr. [Joseph] Morgan is our sponsor and customer, but we also have Dr. Byul Hur as our technical adviser,” Greco said. “Dr. Hur really knows how the communication should go and is guiding us on that part. We have also talked with Mr. Matthew Leonard who is in direct contact with the Qatar team regarding how much the robot should weigh. As a retired NASA program manager, he has been a great resource and wealth of knowledge for what NASA will need.”
The team is eager to meet with NASA in the future to propose the DSTR robot, but is currently focused on making the necessary developments.
“While it would be really cool to present this to NASA, we know that our team may not get that opportunity,” Greco said. “This is a massive project that still needs a lot of work to be completed. We are all so thankful to have had this capstone design opportunity and to work on this groundbreaking project with a team of students on the other side of the world.”
https://today.tamu.edu/2016/10/21/robin-murphy-presents-at-white-house-frontiers-conference-receives-nsf-robotics-grant/
###
This story by Lorian Hopcus was originally posted on the College of Engineering website.
Media contact: Aubrey Bloom, abloom@tamu.edu