Capstone Project Plans Driverless Go-Kart

What does it take to earn a diploma at Texas A&M University? For a group of seniors in the Department of Engineering Technology and Industrial Distribution, their final undergraduate degree requirement involves a display of street magic — or so it appears.
The team’s task is to equip a go-kart so that the electronic vehicle will follow another go-kart all on its own, as in: without a driver. This study in intelligent transportation systems is the capstone design project plan for one male student and three female students in the department’s Electronics Systems Engineering Technology program as they prepare for graduation in December.
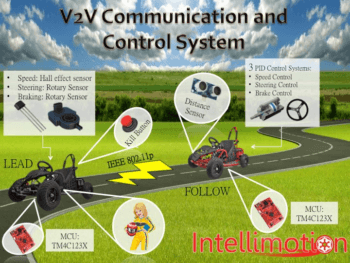 Intellimotion Innovations is the name of the team, whose objective is to create a scaled prototype of a phase 1 vehicle following system, with all movement dependent upon wireless sensing, control and communication. The lead vehicle will have a driver and the second go-kart will trail its path autonomously. Such synchrony does not come by accident, but will be the direct result of the mindful assembling of the four students as a corporate body.
Intellimotion Innovations is the name of the team, whose objective is to create a scaled prototype of a phase 1 vehicle following system, with all movement dependent upon wireless sensing, control and communication. The lead vehicle will have a driver and the second go-kart will trail its path autonomously. Such synchrony does not come by accident, but will be the direct result of the mindful assembling of the four students as a corporate body.
“We grew together over the years,” said project manager Edna Cano of the team’s decision to work together. Each member self-selected his or her own position for the project. “We have to implement hardware, software and control design into two vehicles, they must be scaled and they need to work in an enclosed area with the second vehicle having to intelligently mimic the first vehicle.”

The first vehicle is going to have sensing and it will process data that wirelessly communicates with the second vehicle, controlling the vehicle’s speed, steering and braking.
“Right now we are in the planning stage, doing research,” said Cano. “I feel confident that we’ll get this done.”
“We’ve already talked amongst ourselves that when the summer hits we are not leaving on vacation but we are going to stay here and work,” said Geno Martinez, software engineer.
Continue reading on Engineering Today.
This article by Kidron Vestal originally appeared in Engineering Today.